Taming of the Panda#
Author : Jun Kawahara (Fablab Kamakura)
Date created : 14/12/2020
updated : 16/12/2020
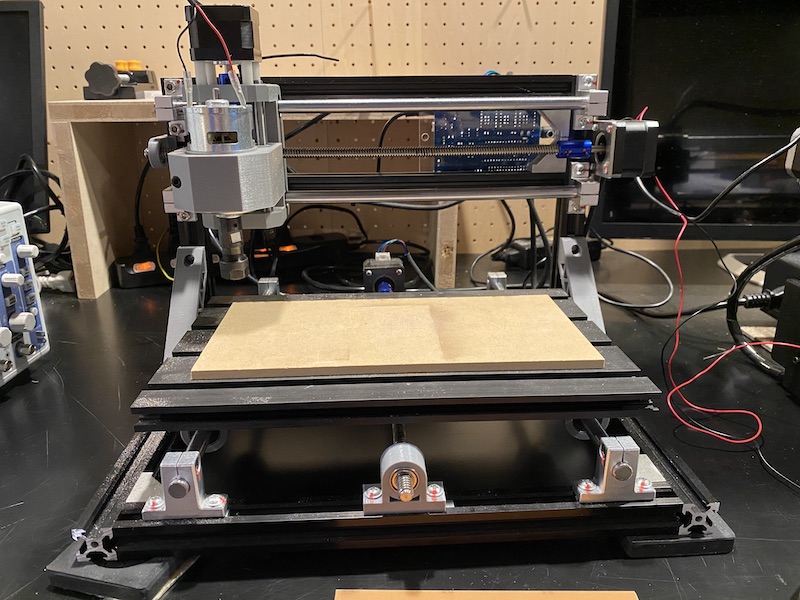
Panda, a.k.a. CNC-2418, is a grbl-based CNC machine. Followings are the specifications.
- working area: 240 x 180 x 45 mm
- g-code parser: grbl 0.9
- spindle: 775 motor with ER-11 collet
how to mill the board with Candle#
To control a grbl-based CNC machine, you need a g-code sender to communicate with the machine. There are options. For examples,
Here I’ll explain how to mill the board with Candle.
-
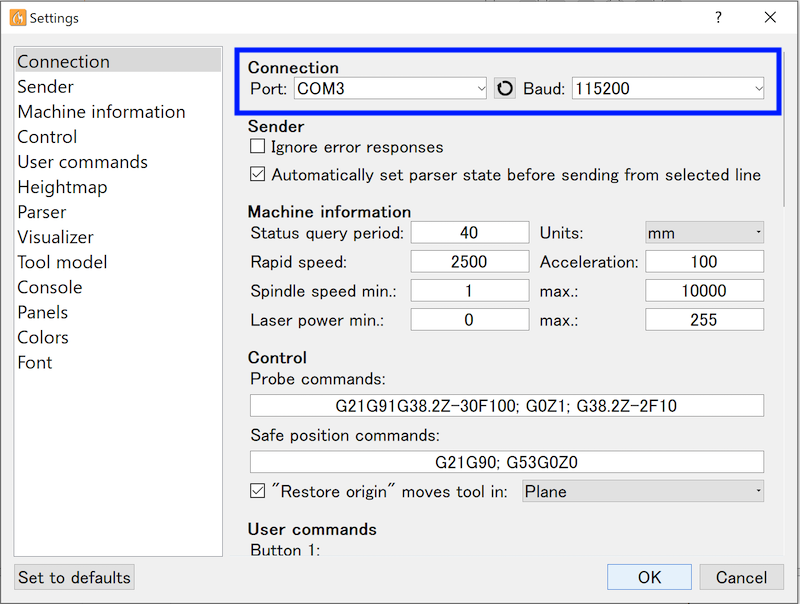
Launch Candle. Candle > Preferences.. > Communication and select a port.
-
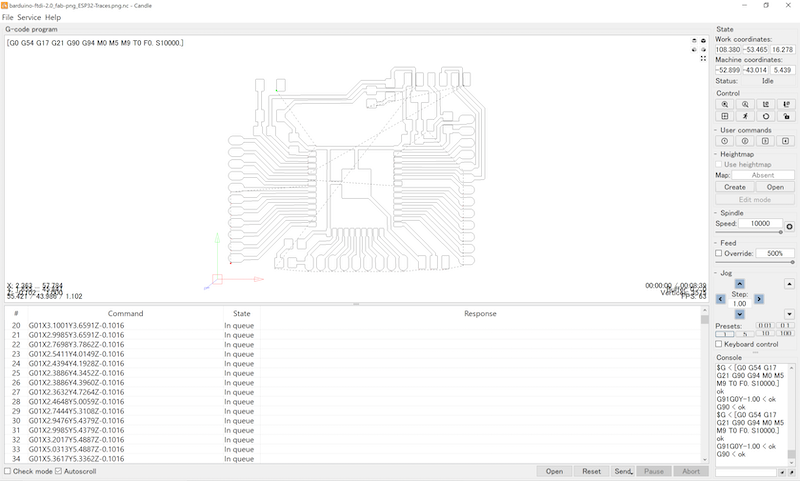
File > Open, and select a g-code(.nc) file to mill.
-
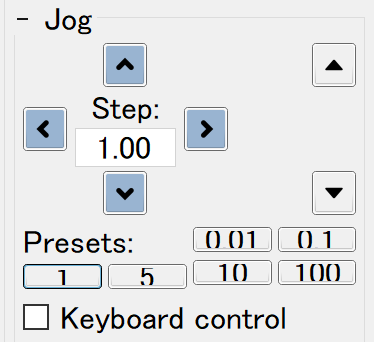
Use jog to move the endmill along X/Y axis to where the origin of the work coordinates should be.
-
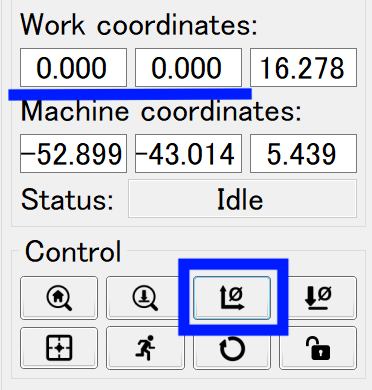
Press XY zero button to set (0, 0) of the work coordinates.
-
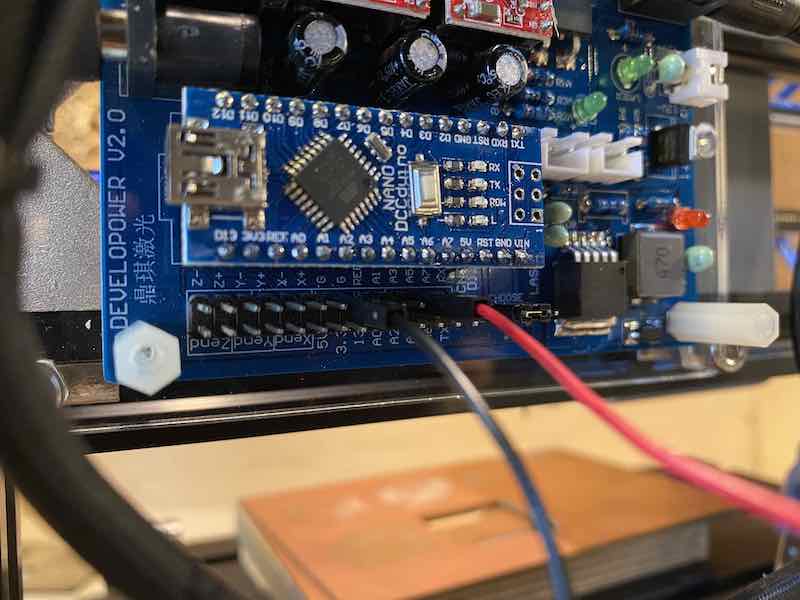
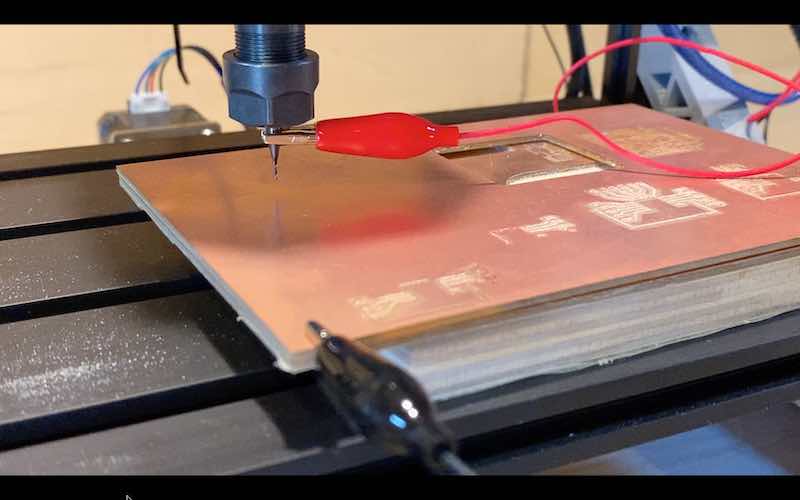
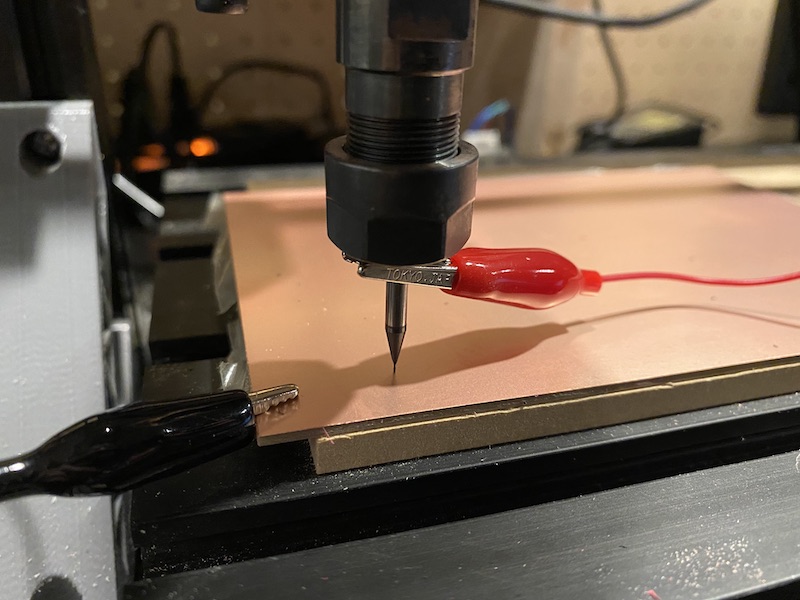
Connect alligator clips to A5 and GND of an Arduino, then A5 to an endmill, GND to the PCB sheet.
-
Press Z-Probe. After the z-axis stops, press Zero Z button.
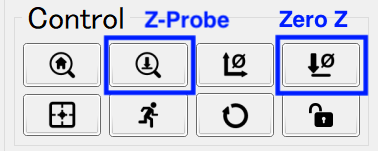
Raise z-axis 1 mm for the height mapping.
-
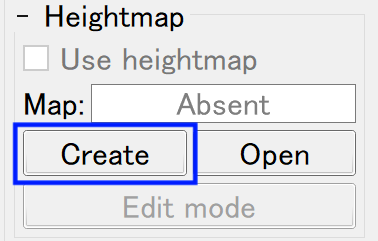
Click Create in Heightmap menu.
The red rectangle is the area that will be probed to create the height map. Pressing Auto button resizes area for the height mapping.
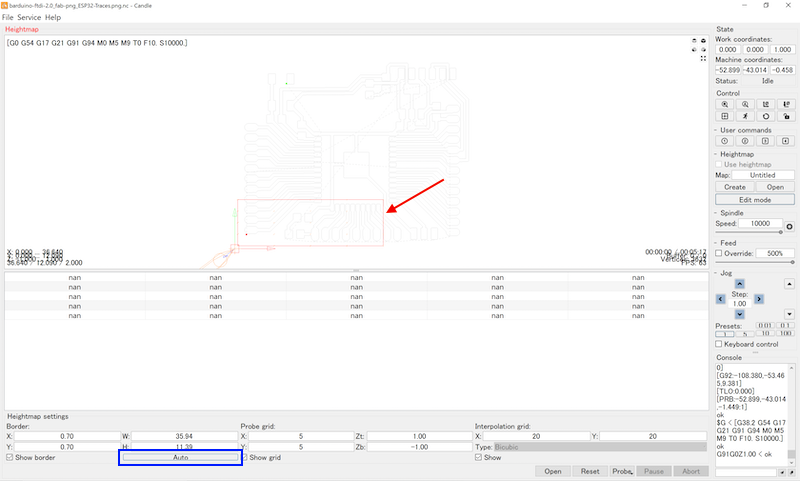
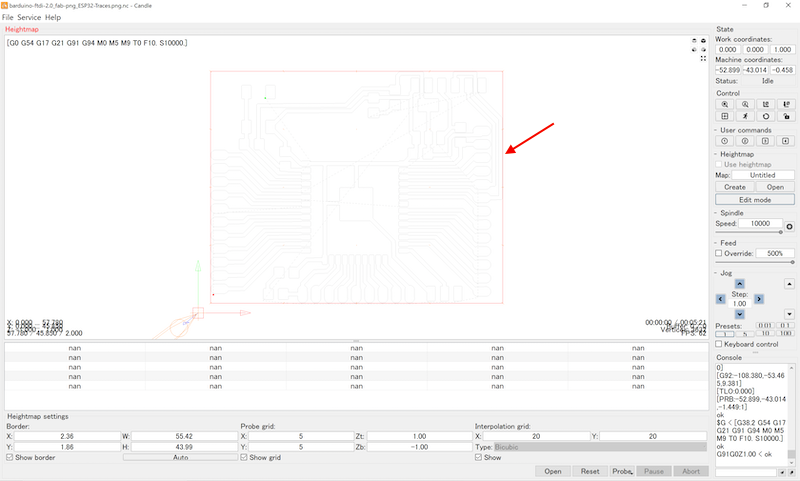
Set Probe grid. These are the probing points along the X and Y axis.
-
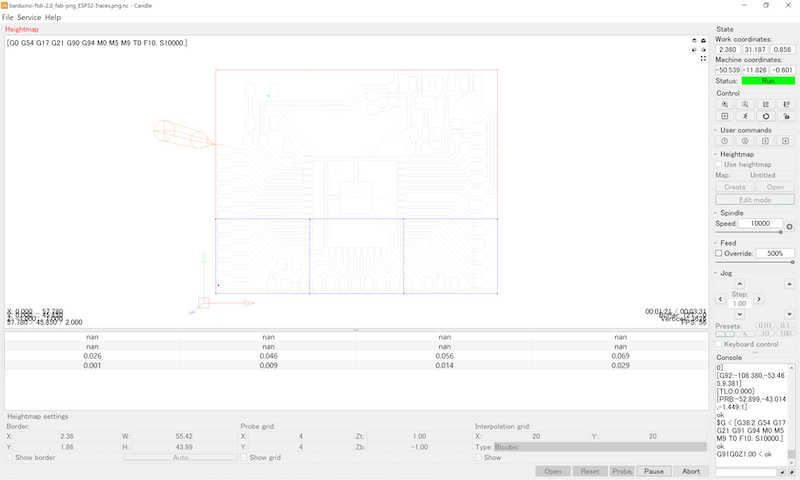
Start Probe. It will take minutes depending on the board size and the probing point.
-
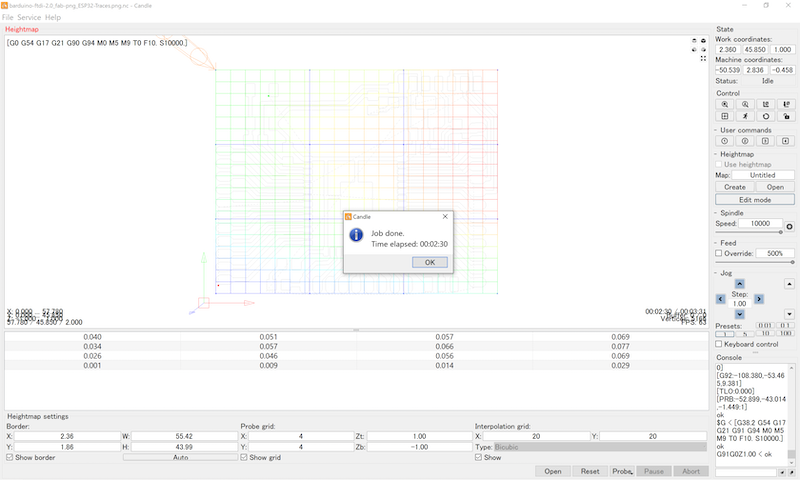
When job done, click OK.
-
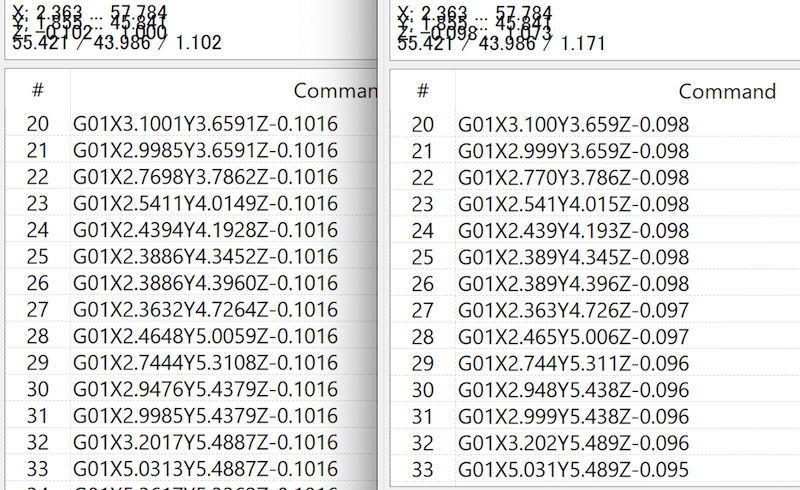
Back to Edit mode, and check use heightmap checkbox.
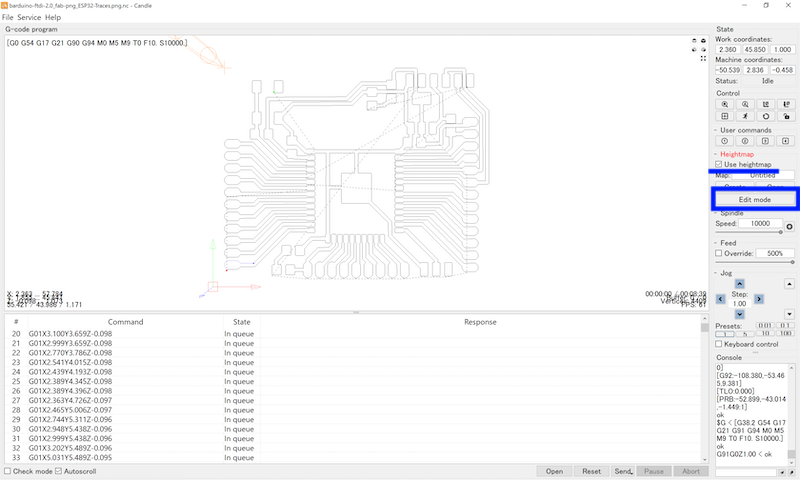
It will recalculate the plunge depth values of a g-code. In the image below, initial g-code(left), recalculated gcode based on the measured height mapping.
-
Remove the alligator clips from the endmill and a PCB, then click the Send button. Milling will start.
milling results#
Test millings were done with following conditiions.
- CAM: mods (G-code/milling 2D png)
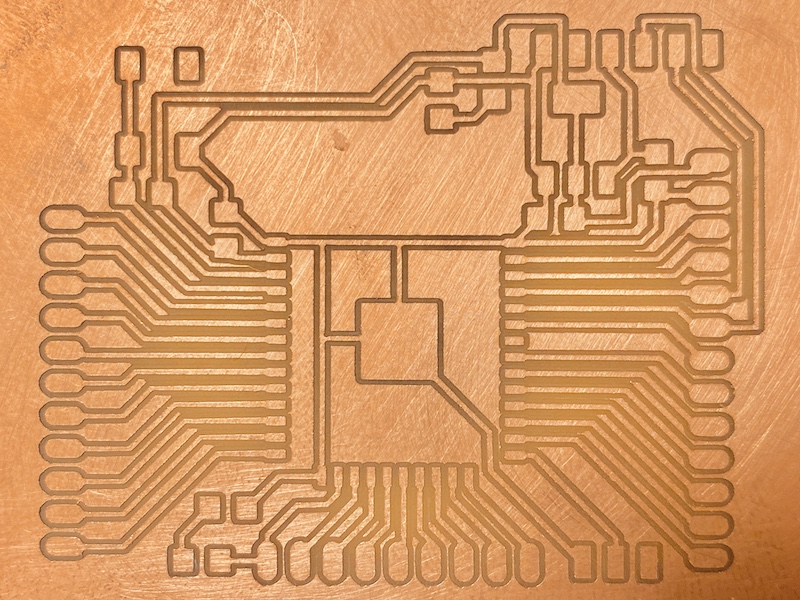
- boards: linetest, barduino2.0
- feed rate: 4mm/s
- endmill: standard 1/64 2F SE
- spindle speed: 10,000rpm
- offset: 1
- g-code parser: grbl 0.9
- g-code sender: Candle 1.0 with heightmap
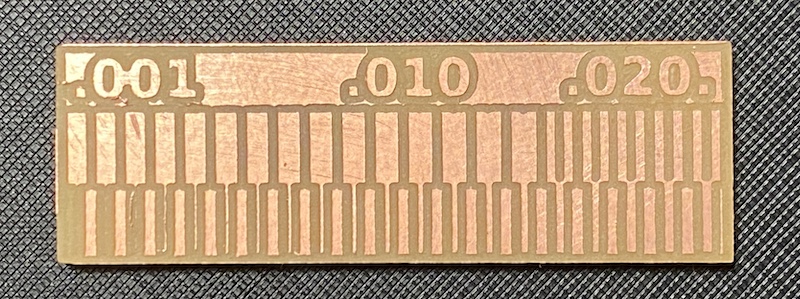
linetest#
Barduino 2.0#